一、 简介市面上车型所配备的HUD大致分为两种,一种是直接投射在挡风玻璃上的W-HUD(Windshield HUD),这种HUD需要其配备额外的透镜来抵消玻璃弧度产生的畸变,成本比较高,其缺点是信息展示过于分散,容易错失关键信息。AR-HUD,可以看作是W-HUD的升级版,通过增强现实技术与HUD的融合,可以在驾驶人视线区域内合理、生动地叠加显示一些驾驶信息,并结合于实际交通路况。
另外一种是在仪表盘顶部类似翻盖设计的C-HUD(Combiner HUD),C-HUD显示屏为放置于仪表上方的一块透明树脂玻璃,一般会根据成像条件对这块玻璃进行特殊处理,这种集合式的HUD可以加装并拆卸,且成本相对更低。

(a)

(b)
图1 (a)W-HUD示意图;(b)C-HUD示意图。
HUD的成像解决方案可以分为三类:反射型、玻璃成像型和虚拟成像型。目前反射型成像方案和玻璃成像方案是发展比较成熟的。现有的平视显示器是将其图像固定在挡风玻璃前方一定距离处,而本文所提到的两种HUD结构是在不同距离处投影图像。HUD图像的物理距离与适应延迟有关,这是驾驶中的一个安全问题,也可能是AR功能的一个关键参数。
华为近期的“专新致智”新品发布会上,发布了包括AR-HUD在内的新一代智能化部件和解决方案。华为打造了小身材、高性能的AR-HUD。它体积只有10L,会根据用户眼睛位置调整投影区域,因此普通风挡即可使用;视角达到13°×5°,能够展现更多内容;同时,它能够在7.5m的距离上具备70寸大小的画幅,拥有高清画质,让用户体验到AR-HUD带来的沉浸式视觉体验和驾驶安全辅助。 二、 背景出于驾驶安全性的考虑,如果HUD显示的图像并不在驾驶员聚焦在行驶道路和周围景物上的位置,人眼将会有一段时间调整聚焦延迟的时间。所以设计不同变焦位置的HUD有其必要性,驾驶者需要两个或多个焦平面来显示基本信息和交互信息。
现在的解决方案是在两个不同的距离上同时产生图像,与图形技术一样产生视觉上沉浸的图像,当然,有物理可调图像距离的HUD也是解决问题的方案。本文主要讨论两种HUD,一种是双焦面HUD,另一种是可连续变焦的HUD。
要实现双焦面成像,如果用2个物理PGU(Picture Generation Units)和两套反射光学系统实现两个不同的投影距离,这将增加成本,可靠性降低,体积增大。所以这里提出了一种只用单个PGU和一个自由曲面镜构成的实现双焦面系统的新的HUD结构。本文研究团队提出在一个PGU上设置两个逻辑上分离的区域,并将其中一个区域通过光学中继到一个新的位置来创建两个焦平面。 三、 两种可变焦HUD基本构造和设计原理3.1 双焦面HUD双焦面AR-HUD显示的信息是将基本信息显示在下方而把更丰富的道路信息,如与车道线交互的导航信息以及与前车的车距等信息显示在上方。上方的虚像距要大(9m),为了避免虚拟图像与真实对象(如车道线或前方车辆)的深度匹配造成的视觉冲突,下方的虚像距/虚像深度要小(2.5m)以避免与真实世界重叠以影响驾驶员。
相较于VR/AR中的近眼显示,HUD需要更大的眼动范围(120mm×60mm)和更大的出瞳距离(900mm)。

图2 双焦面HUD结构示意图(PGU分成两个逻辑单元R1和R2)。
如图2所示,将单个PGU逻辑分隔为两个区域,分别是R1和R2。R1图像被自由曲面镜M0直接反射到挡风玻璃上,而R2被平面镜反射中继到一个新的空间位置,从而投影到一个比原来更远的距离。这样一来,系统中即同时存在一个远焦面(9m,10°×3°)和一个近焦面(2.5m,6°×2°)。
为了在仪表板下有限的空间内折叠光路,R2的中继光学装置包括两个平面镜M1和M2,从而在中间依次形成了两个中间像R2'和R2'',R2''相当于自由曲面M0的等效物面。这样,R1和R2''在上方视场和下方视场分别形成了不同距离的虚像投影。
在这样的HUD中,由于两条不同光路的互相干扰会产生杂散光,为了减少这种干扰,研究团队在物理上设置了分隔R1和R2的吸收壁。此外,从PGU发出的光通常是高度准直的,满足HUD的高亮要求,可以进一步帮助抑制杂散光。
传统的单自由曲面HUD基本抑制了所有的像差,只有轻微的剩余畸变,而且可被数字化校准。但限制两个光路共用一个自由曲面反射面的话像差会更大,所以在系统优化像差的时候必须考虑到。挡风玻璃也会影响成像质量。
表1 双焦面HUD的设计要求规格表

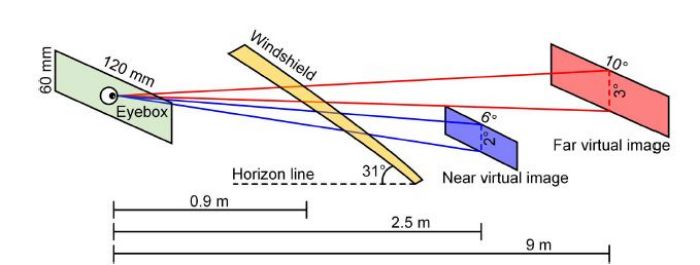
图3 双焦面HUD设计要求示意图。
双焦面HUD系统的虚像视场范围、投影距离等参数如表1所示。系统所用的PGU是一个符合汽车标准的,尺寸为6.6cm的分辨率大小为800 × 480的LCD显示屏。这种双焦面HUD方案具有投影距离可调节、系统紧凑的特点。 3.2 可连续变焦HUD可变焦HUD的基本原理如下R2:首先,用全息成像在近场产生位置可调的图像,使其在特定范围内具有一定纵深;然后,用几何成像将纵向范围放大到所需要的可调范围。已知纵向放大率是横向放大率的平方,根据物像距公式,当物距大小无限接近焦距时,像距快速趋向于无穷大。
具体设置为:用SLM生成全息图像,其同时也作为几何成像的物;两个全息图像的位置在凹面镜的焦距内,用凹面镜放大图像尺寸以及纵向可调范围,人看到的是挡风玻璃前方的虚像;在产生全息图像的迭代优化过程中采用了近场衍射公式,用迭代傅里叶变换算法(IFTA)来优化SLM调制图案。因为在SLM上只有相位调制可用,并且期望的目标图案是用强度分布来指定的,所以采用了Gerchberg-Saxton算法。
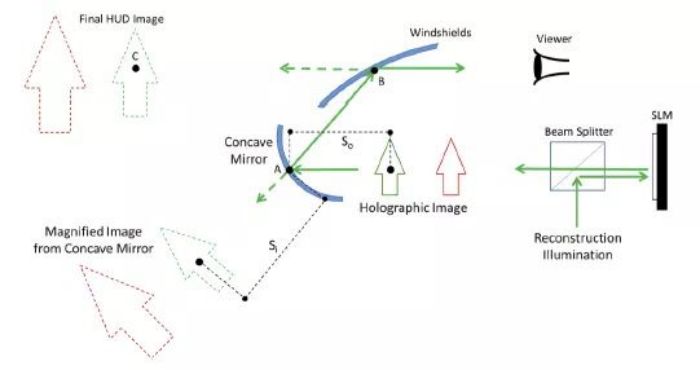
图4 有可调像距的HUD结构(红色绿色图案代表全息成像的两个极限位置)。
四、 两种HUD的实验验证与性能评价4.1 双焦面HUD在光路结构模型中,对每一个虚像在全视场范围内选取了9个视点,在近焦面选取了9个视点F1~F9,在远焦面也选取了9个视点F10~F18。考虑到应该在整个眼动范围内实现高质量的图像,所以在眼瞳箱(120mm×60mm)选取了直径为6mm的5个主眼点和间隔为20mm的24个次眼点。通过自由曲面镜片反射后,不同视场与不同眼点的组合90束光在不同位置汇聚形成两个像面R1和R2''。次级眼点与18个视点的组合是为了进行后续图像质量测试,全面展示成像性能。
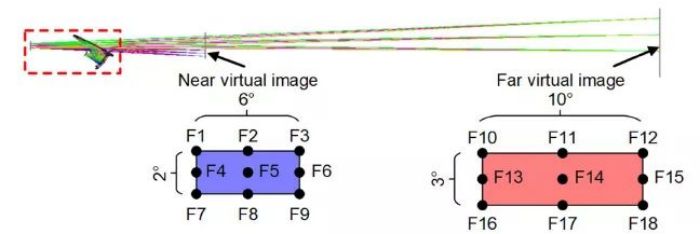
图5 双焦面HUD的仿真模型示意图。

图6 双焦面HUD的仿真模型示意图。
成像质量评价主要从这18个视场和5个主眼点位置/24个次眼点位置组合所成像的点列图、MTF、畸变网格图、垂直发散度这几个维度来评价。对应5个主眼点和24个次眼点的9个视场的点列图如图7所示。黑色圆圈表示直径为82.5μm的艾里斑。
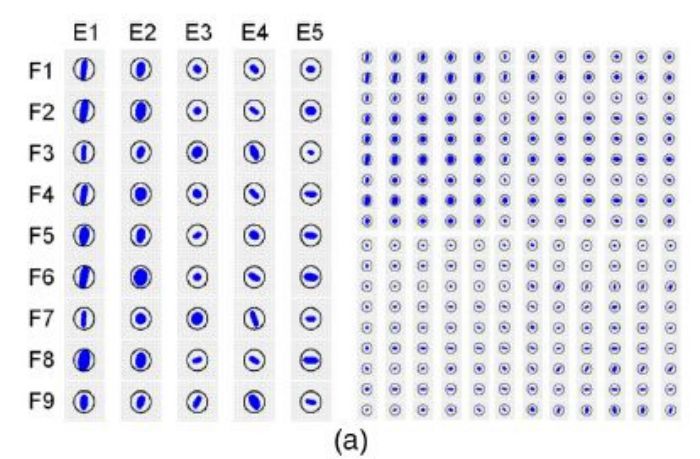
图7 (a) 近焦面虚像(F1-F9)和 (b) 远焦面虚像(F10-F18)中对应5个主眼点E1-E5(左)和24个次眼点(右,所有结果混合)的9个视场的点列图。
对于近焦面虚像和远焦面虚像,图8绘制了9个视场和5个主眼点的子午方向和弧矢方向的MTFs以及衍射极限。此外,所有MTF都是接近衍射极限的,在截止频率为7.1lp/mm时,所有MTF值都超过了0.4,这也表明在整个视场和眼瞳箱中有足够大的分辨率。同时,还仿真了五个眼点位置对应的远近这两个视场的网格图像。近焦面、远焦面对应的最大畸变值分别为3.05%(+y方向的E1)和2.68%(+x方向的E3)。

图片(a)

图片(b)
图8 (a) 近焦面和 (b) 远焦面MTF示意图。
考虑到驾驶员在观看HUD所成图像舒适度的问题,特别是在具有两个或两个以上焦平面的系统中,需要研究不同眼点所成像之间的垂直发散误差。在双目系统中,垂直发散误差被定义为左右眼为了看到相同的像点而看到的垂直方向上的角度差值,这个角度差在理想系统中应该为零。而在实际的HUD中,垂直发散误差应在2.5mrad内,以避免视觉不适。
图9为两眼分别位于眼瞳箱边缘位置时的垂直发散度模拟结果,即瞳间距最大的情况。在图9中,将用于测试垂直发散度的像点扫描整个视场,横坐标表示垂直扫描角度,线颜色表示水平扫描。由结果可见,垂直发散度总是小于2.5mrad。一个驾驶员的瞳孔间距总是比眼瞳箱宽度小得多,因此不会因垂直发散角而感到不适。
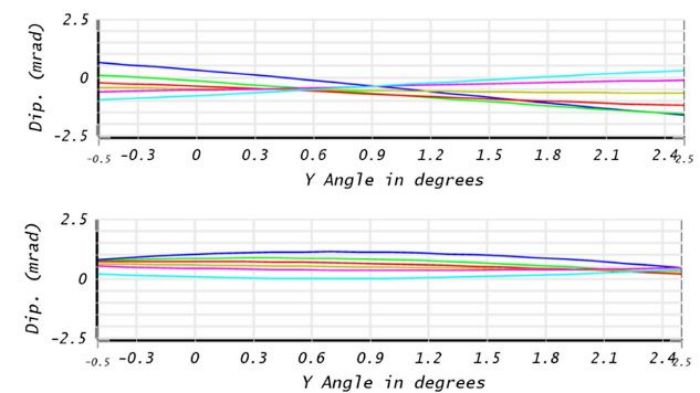
(a)

(b)
图9 (a) 远焦面和 (b) 近焦面两个不同光瞳之间的发散度。
上图为眼点位置E1和E2对应的垂直发散度,下图为眼点位置E3和E4对应的垂直发散度。 图10展示了一个用LightTools搭建的有中继光学系统的AR-HUD光机模型。其中两条红线代表了远视场在垂直方向上的边界光线,两条蓝线代表了近视场在垂直方向上的边界光线。从放大的中继光学系统图中可以看到在单个物理PGU上的光线分隔情况。
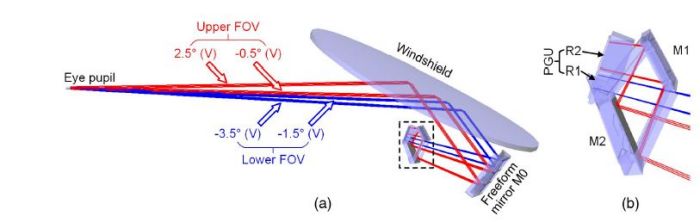
图10 双焦面HUD光机模型。

图11 (a) 车辆框架和真实挡风玻璃,安装AR-HUD并在挡风玻璃上显示虚拟图像;(b) 上视场和下视场图像的照片;(c) 水平移动相机后重新拍摄的照片。在 (b) 和 (c) 中,背景中的黑板和人手的距离分别为9m和2.5m。
通过光学与机械的优化设计,在整个眼瞳箱内(120mm×60mm)获得了高质量的图像。实验验证了这种结构的HUD可以实现两个不同的投影距离,且投影的图像质量高。 4.2 可连续变焦HUD验证实验设备如图12所示,光源是一个中心波长为532 nm的绿光LED,为了增加空间相干性,还附加了一个直径为0.3 mm的针孔。凹面镜的焦距是30cm,SLM所成真实图像在相对SLM距离18.3cm~21cm的位置,相对于凹面镜的物距是27cm~29.7cm(两者相隔8.7cm),根据成像物像公式可得像距为270cm~2970cm,再加上人眼到挡风玻璃的距离30cm,可得相对于人眼的像距为3m~30m。
图13为用相机在3m到30m的不同距离捕捉到的HUD图像。实验发现,与背景中的消防器清晰度相比,相机在22.5m左右的位置捕捉到的图像比30m处的位置更清晰。究其原因,一个是LED光源的空间相干性较低,一个是凹面镜高度离轴几何成像引起的像差,挡风玻璃也可能引入了部分像差以及场曲。
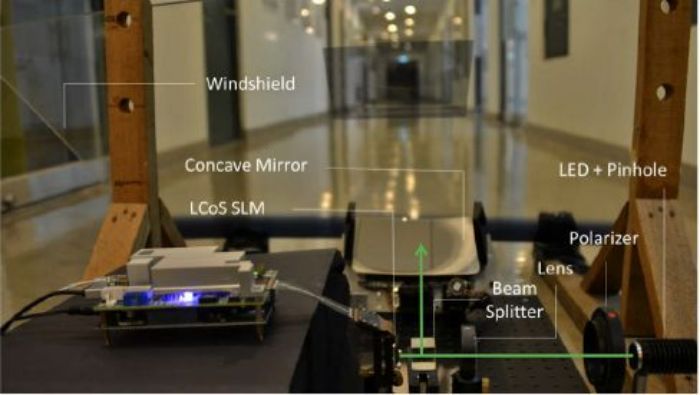
图12 HUD系统样机。

图13 相机拍摄的在3m像距和30m像距之间变换的HUD成像效果。
图14是基于心理物理测试的视差法验证了物理图像位置(距离),绿T代表所成虚像位置,黄色小棍作为测量中的参照物代表实际物体位置。如果小棍没有放在HUD成像的正确位置,如图13(a)所示,从不同方向观看能明显观察到两个视点的相对横向位移。
如果小棍放对位置了,如图13(b),无论观察者如何移动看到的都是小棍和绿T是重合的。将计算所得的HUD所成像的距离与心理物理评估法测得的HUD所成像距离对比,发现两者之间的误差低于2%,说明在HUD可调变焦过程中人眼主观感知到图像误差的可能性很小。
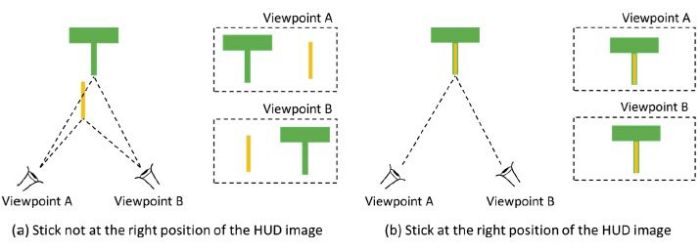
图14 用视差法验证像距。
五、 结论
5.1双焦面AR-HUD用单个图像生成单元(PGU)和单个自由曲面镜实现双焦面AR-HUD显示,在中继光学系统部分是用两个平面镜将部分PGU中继到一个新的位置,从而产生两个不同投影距离。
通过光学与机械的优化设计,在整个眼动范围内(120mm×60mm)获得了高质量的图像,远焦面(9m,10°×3°)和近焦面(2.5m,6°×2°)。最后还制造了一个基于6.6cm LCD的AR-HUD产品。实验验证了图像质量高以及两个不同的投影距离。此外,与两个分离PGU的HUD相比,这款AR-HUD体积紧凑为 8.5L,这可以帮助它应用于小型车辆,提高行车安全性和驾驶体验。
5.2可变焦HUD通过组合全息成像和几何成像技术,实现了无机械移动的可调节像距在挡风玻璃前3m~30m的HUD。这个调节范围可通过改变SLM的调制度、凹面镜的光焦度以及凹面镜与SLM之间的距离来实现。



 明基投影机
明基投影机 坚果投影机
坚果投影机 科视投影机
科视投影机 极米投影机
极米投影机 SONNOC投影机
SONNOC投影机 宝视来投影机
宝视来投影机 视美乐投影机
视美乐投影机 当贝投影机
当贝投影机 哈趣投影机
哈趣投影机 WAP手机版
WAP手机版 建议反馈
建议反馈 官方微博
官方微博 微信扫一扫
微信扫一扫